



📢 转载信息
原文链接:https://machinelearningmastery.com/7-must-know-agentic-ai-design-patterns/
原文作者:Bala Priya C
在本文中,您将了解到七种成熟的Agentic AI设计模式,了解何时使用每种模式,以及如何为您的生产工作负载选择正确的模式。
我们将涵盖的主题包括:
- 核心模式,如ReAct、反射(Reflection)、规划(Planning)、工具使用(Tool Use)、多智能体协作(Multi-Agent Collaboration)、顺序工作流(Sequential Workflows)和人机协同(Human-in-the-Loop)。
- 不同模式之间的权衡:成本、延迟、可靠性和可观测性。
- 一个实用的决策框架,用于在生产环境中选择和演进这些模式。
我们不再浪费时间了。
七种必须了解的Agentic AI设计模式
图片来源:编辑
引言
要在生产环境中构建能正常工作的AI智能体,需要的不仅仅是强大的模型。您需要一个清晰的结构来指导智能体如何推理、协调、自我修正和使用工具来完成目标。
设计模式正是提供了这种结构。它们就像定义智能体行为的蓝图,帮助我们将有能力的模型转化为可靠的系统。那些能够扩展的智能体与那些挣扎不前的智能体之间的区别,就在于是否选择了与任务需求相匹配的模式。
本文将解释区分有效智能体与昂贵实验的七种设计模式。这些模式借鉴了谷歌、AWS和其他大规模部署智能体的团队发布的研究和指南。
1. ReAct 模式:推理与行动
ReAct(推理与行动)模式将智能体行为结构化为明确的推理循环。智能体不会直接得出结论,而是在以下阶段之间交替进行:
- 推理(分析当前信息并识别信息空白),
- 行动(执行工具或查询),以及
- 观察(评估结果以确定下一步行动)。
这个循环会重复进行,直到任务完成。
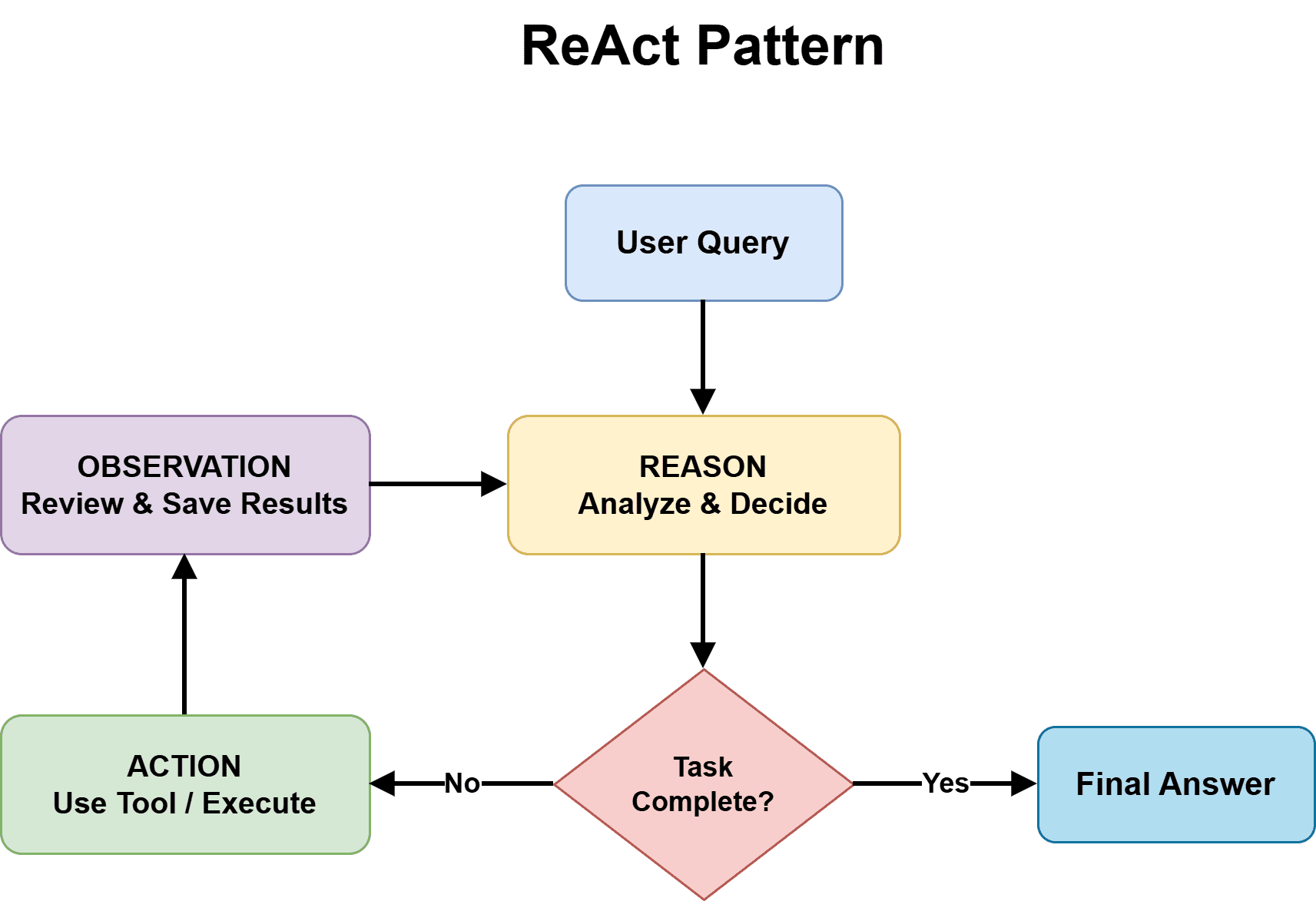
ReAct 模式 | 图片来源:作者
ReAct模式有效之处在于推理过程被外部化了。每一个决策都变得可见,形成了一个清晰的审计跟踪。当智能体失败时,您可以确切地看到逻辑在哪里出现故障。该模式通过强制智能体将每一步建立在可观察的结果上,从而防止过早下结论并减少幻觉。
适用场景:当任务需要适应性的问题解决,且解决方案路径不是预先确定的。例如:
- 跨多个来源追踪证据的研究智能体
- 通过迭代假设检验诊断问题的调试助手
- 处理需要调查的非标准请求的客户支持智能体
局限性:ReAct模式是用思考来换取速度。每个推理循环都需要一次额外的模型调用,这会增加延迟和成本。如果一个工具返回了错误数据,该错误可能会在后续的推理步骤中传播。此外,该模式的有效性取决于底层模型的推理能力:弱模型会产生弱的推理链。
对于复杂、不可预测的任务,ReAct可以是您的默认起点。它提供的透明度使调试更快,并增强了对智能体决策的信任,即使每次请求完成需要更长时间。您将在计算上花费更多,但在解决损坏的智能体行为上花费更少。
2. 反射(Reflection)模式:自我批判的智能体
反射模式在智能体输出之上增加了一个自我评估层。智能体生成初始响应后,会明确切换到“评论家模式”来评估自己的工作。在此批判阶段,它会检查准确性、验证是否遵守约束条件,并识别逻辑上的差距或不一致之处。如果自我评估发现了问题,智能体将修改其输出并重复该过程,直到达到质量阈值。
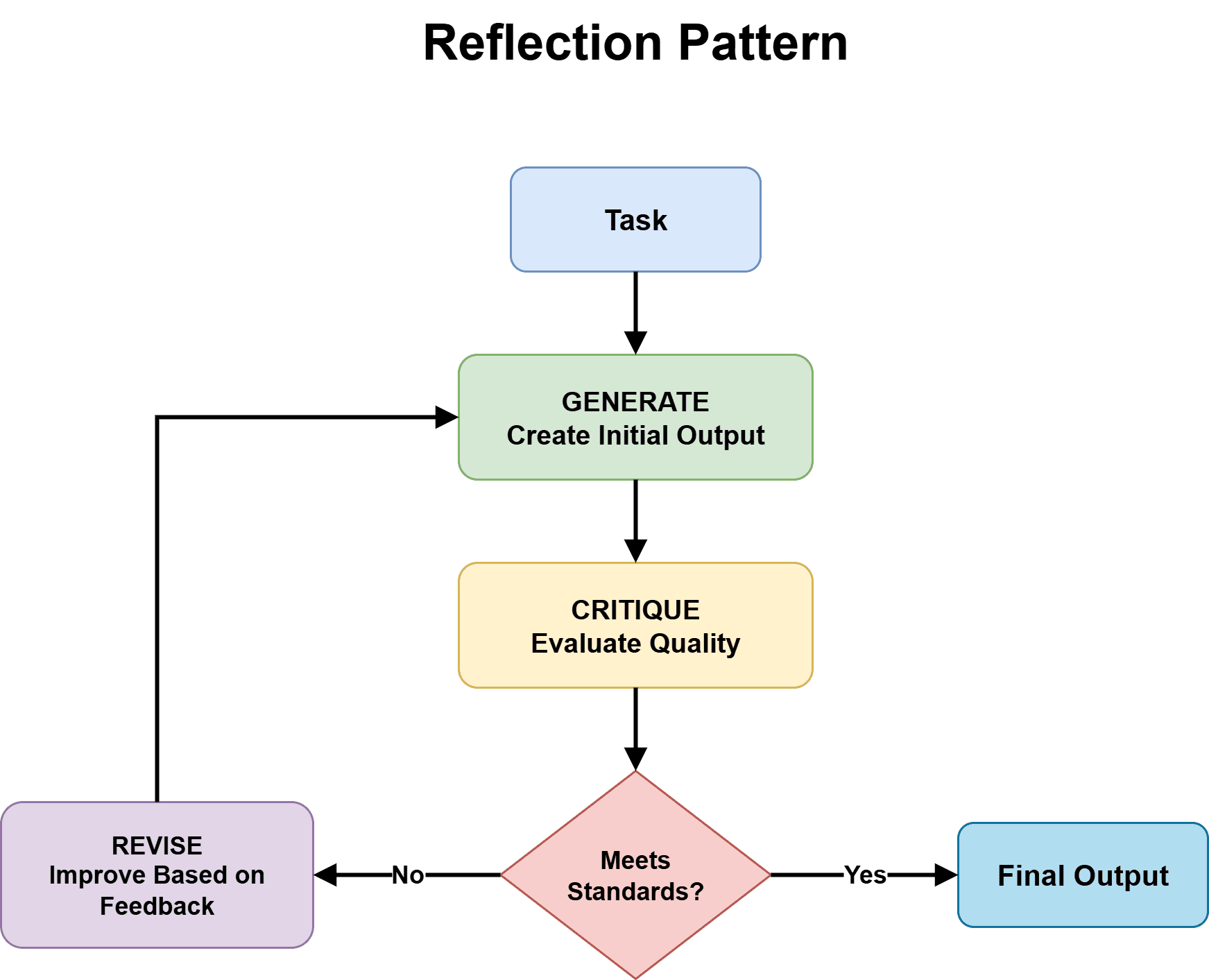
反射模式 | 图片来源:作者
关键优势在于角色的分离。通过迫使智能体退后一步进行评估,而不是辩护其第一个答案,可以减少确认偏误。智能体将其自身输出视为外部内容一样对待。
适用场景:当输出质量远比速度重要,且错误会带来有意义的后果时。这适用于以下任务:
- 需要安全审计或合规性检查的代码生成
- 发布前需要事实核查的内容创作
- 可能导致资金损失的财务分析
局限性:每个反射周期都会增加Token消耗和延迟。如果没有明确的退出条件,智能体可能会不必要地循环——要么永远无法满足自己的标准,要么仍然产生有缺陷的工作。您的批判标准必须具体且可衡量;诸如“检查它是否足够好”之类的模糊指令会产生不一致的结果。
当错误成本超过额外处理时间的成本时,反射模式是合理的。在具有明确质量标准的领域中,它尤其有效,这些标准可以通过程序化验证。然而,它需要前期投入来定义“足够好”的标准,否则您将浪费资源在那些未能提高结果的修改周期上。
3. 规划(Planning)模式:在构建之前先分解
规划智能体在开始执行之前,会将复杂任务分解成结构化的路线图。它们不会直接尝试解决问题,而是首先分析需求、识别子任务之间的依赖关系,并按逻辑顺序排列操作。只有在创建了详细的计划后,智能体才会开始实际工作,遵循其构建的路线图。
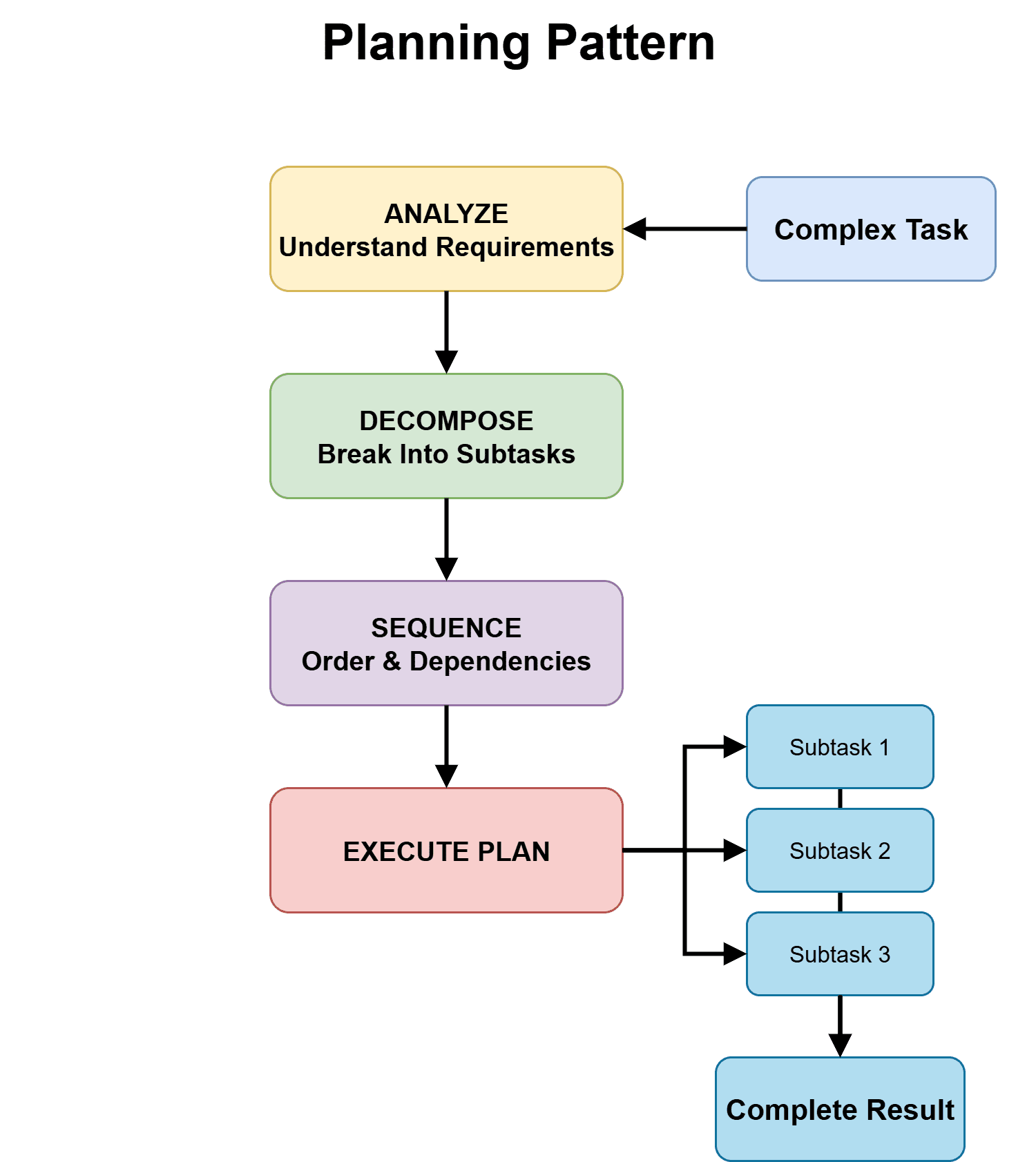
规划模式 | 图片来源:作者
这对于具有隐藏复杂性的任务非常有帮助。看似简单的请求通常需要协调多个系统、处理边缘情况以及综合来自不同来源的信息。规划智能体立即暴露了这种复杂性,避免了智能体在执行过程中发现方法错误而造成的阻碍。
适用场景:任务涉及显著的复杂性或协调性,并且从明确的结构中受益。例如:
- 需要特定序列以避免冲突的多系统集成
- 综合来自不同来源信息的调研项目
- 存在转换步骤之间依赖关系的数据迁移项目
- 协调设计、实施和测试的产品开发工作流
局限性:规划的开销只有在真正复杂的工作中才能证明其合理性。简单的任务不需要复杂的分解。挑战在于准确地预先评估任务的复杂性。
规划模式通过在出现问题之前暴露依赖关系和排序问题,避免了在真正复杂的任务中进行昂贵的错误启动和返工。对于简单的任务,它纯粹是开销;仅将它保留给那些即兴方法一再失败或需要多次尝试才能成功完成的工作。
4. 工具使用(Tool Use)模式:超越训练数据的扩展
工具使用使智能体能够通过集成外部能力来执行其训练数据之外的操作。能够调用工具的智能体可以调用API、查询数据库、执行代码、抓取网站以及与软件系统交互。模型会根据任务需求决定调用哪个工具,解释其输出,并将工具调用串联起来,以实现仅凭静态知识无法实现的目标。
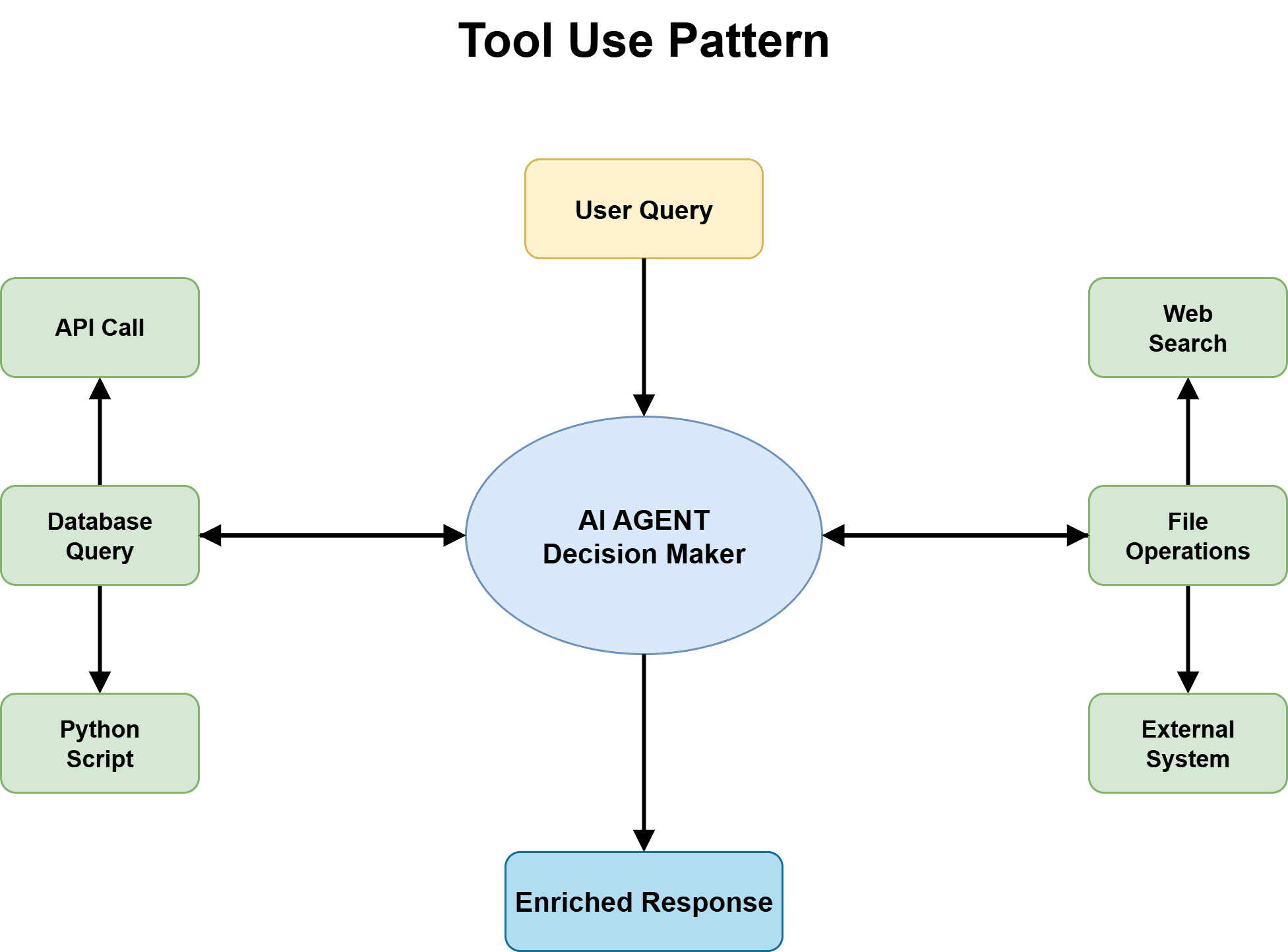 工具使用模式 | 图片来源:作者
工具使用模式 | 图片来源:作者
这使得智能体从知识库转变为能够与世界进行实时交互的主动系统。智能体根据具体情况推理应使用哪个工具,处理工具失败时的错误,并将来自多个工具调用的结果综合成连贯的响应。
适用场景:任务需要当前信息、外部计算或系统交互。例如:
- 查询订单数据库和库存系统的客户服务智能体
- 对实时数据集运行统计计算的数据分析智能体
- 访问超出训练截止日期的最新信息的研究助手
- 在业务软件平台中触发操作的自动化智能体
- 在真实环境中执行和测试代码的开发助手
局限性:工具的可靠性决定了您的Agentic系统的可靠性。当API返回错误、达到速率限制或超时时,您的智能体将继承这些失败。您还需要继承每个集成工具的维护负担,随着API的变化而更新实现。
对于处理现实世界任务的生产智能体来说,工具使用模式几乎是不可或缺的。几乎每一个实际的智能体都需要至少基本的工具访问权限来查询当前信息或触发操作。挑战不在于是否实现工具使用,而在于如何管理工具的可靠性、选择的准确性以及随着工具库的扩大而带来的日益增加的复杂性。
5. 多智能体协作(Multi-Agent Collaboration)模式:专家协同工作
多智能体系统将工作分配给专业智能体,而不是构建一个通才。每个智能体都具有专注的专业知识、特定的工具和系统中明确定义的作用。一个协调智能体管理工作分配,将任务路由给合适的专家,并将他们的输出综合成统一的响应。
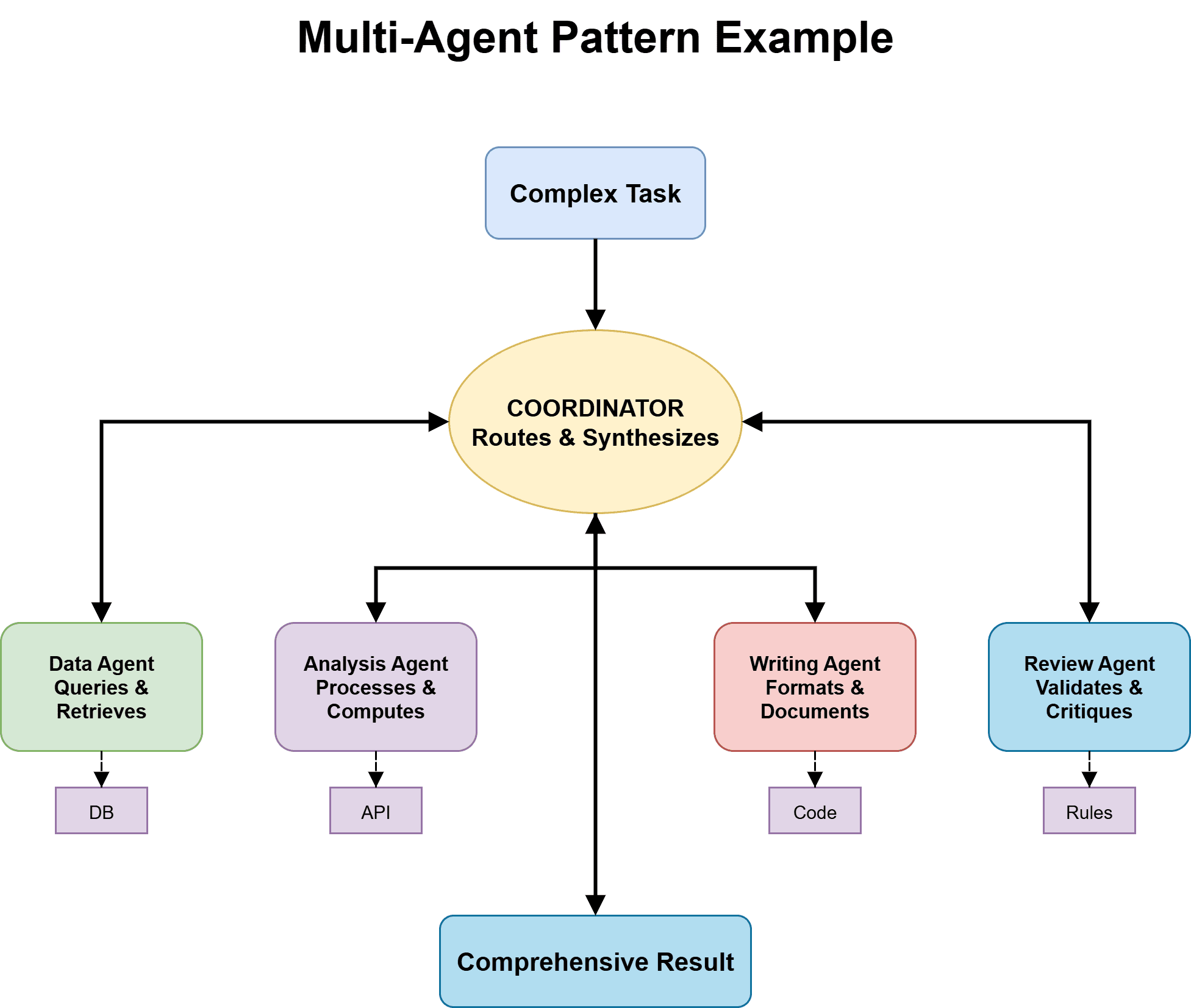
多智能体协作模式 | 图片来源:作者
每个智能体都可以使用有针对性的提示、特定的工具和适当的模型进行优化。如果构建得当,多智能体系统比不堪重负的通才更能有效地处理复杂的工作流程。
适用场景:任务真正跨越了需要不同专业知识和方法的多个领域。例如:
- 需要不同技能集(研究→分析→演示)的复杂工作流
- 任务路由受益于专业化处理的应用
- 由专注于不同用例的智能体更好地解决的应用
局限性:与单智能体系统相比,多智能体系统的构建、调试和维护要困难得多。协调会增加延迟和复杂性。智能体间的通信引入了新的故障模式。成本会随着智能体数量的增加而翻倍。除非单智能体方法确实无法满足要求,否则增加的复杂性是不合理的。
当单个智能体无法有效处理多样化、复杂的需求时,多智能体系统可以解决实际问题。从单智能体开始,仅在您证明专业化带来了可衡量的改进,并且这些改进超过了系统复杂性的显著增加时,才转向多智能体系统。
6. 顺序工作流(Sequential Workflow):可预测的流水线
顺序模式将智能体系统组织成固定顺序的流水线。智能体A完成其任务并将输出传递给智能体B。智能体B处理后交给智能体C。每个专家只负责预定序列中的确切一步。编排不需要AI——只需要决定流程的预定义逻辑。这是智能体系统的装配线方法。
以下是一个示例:
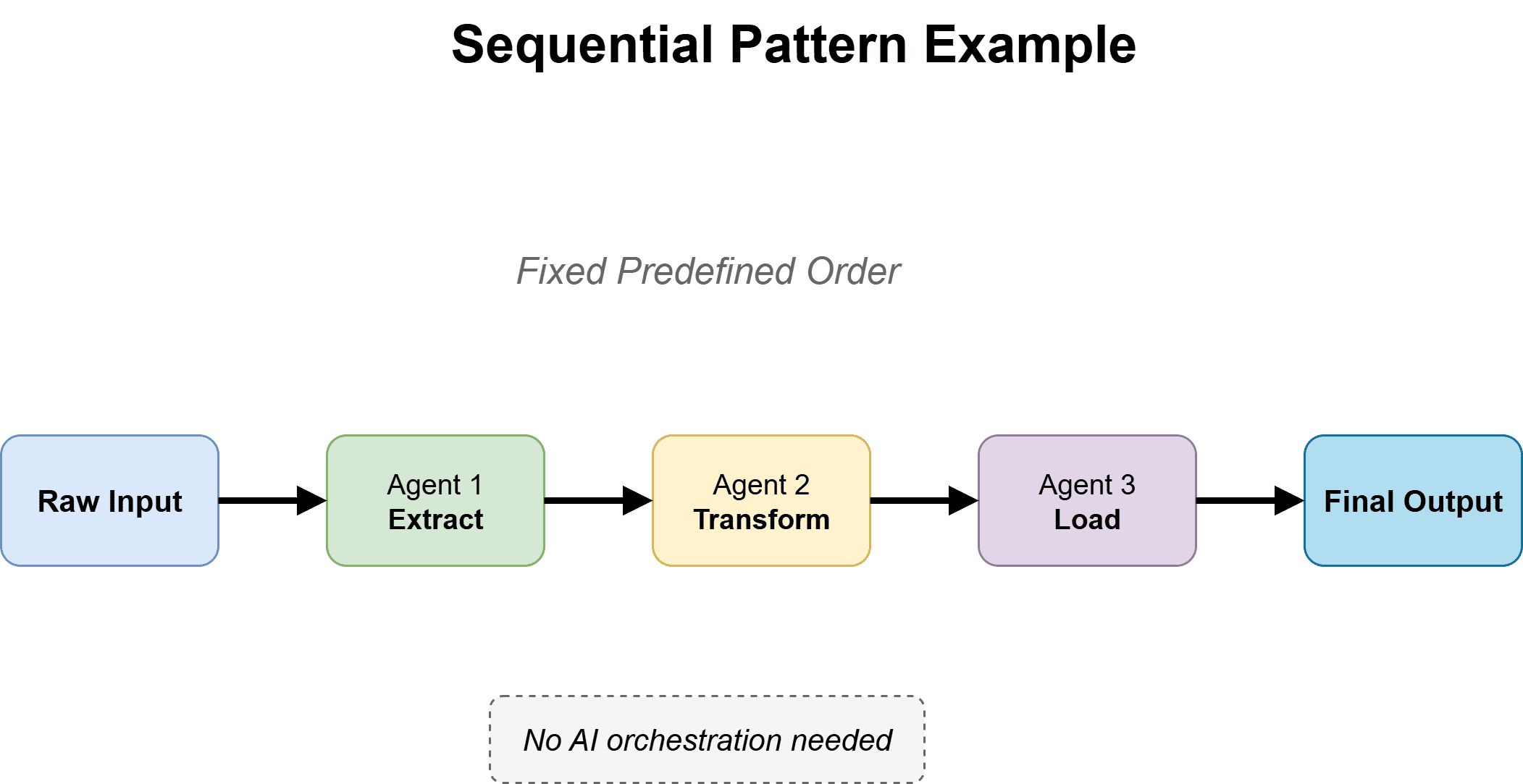
顺序工作流 | 图片来源:作者
优势在于可预测性。顺序工作流具有:
- 比动态路由系统更低的延迟,
- 比基于协调器的模型更低的成本,以及
- 简化调试的可预测行为。
当您确切知道哪个智能体处理哪一步时,故障排除就变得很直接。
适用场景:工作流遵循结构化、可重复的模式,并且处理顺序很少改变。例如:
- 具有提取、转换和加载阶段的数据管道
- 文档处理流程:解析→分析→总结→存储
- 内容审核:检测→分类→路由→行动
- 订单处理:验证→处理→通知→存档
- 报告生成:收集→分析→格式化→分发
局限性:顺序模式无法适应工作流中途改变的条件。如果某些输入不再需要第三步,您仍然会执行它。当工作流需要条件逻辑或动态路由时,顺序模式会迫使您走低效的路径或完全失败。
顺序工作流非常适合那些一致性和效率比灵活性更重要的生产管道。它们为定义明确、可重复的过程最大限度地减少了复杂性和成本。然而,对于需要根据中间结果进行适应或最佳路径因输入而异的任务来说,它们是错误的选择。
7. 人机协同(Human-in-the-Loop):高风险场景的安全护栏
人机协同模式认识到,有些决策不应完全自动化。在关键检查点,智能体会暂停执行并将信息呈现给人工审核员。人类专家评估工作、提供指导或在智能体继续之前授予批准。
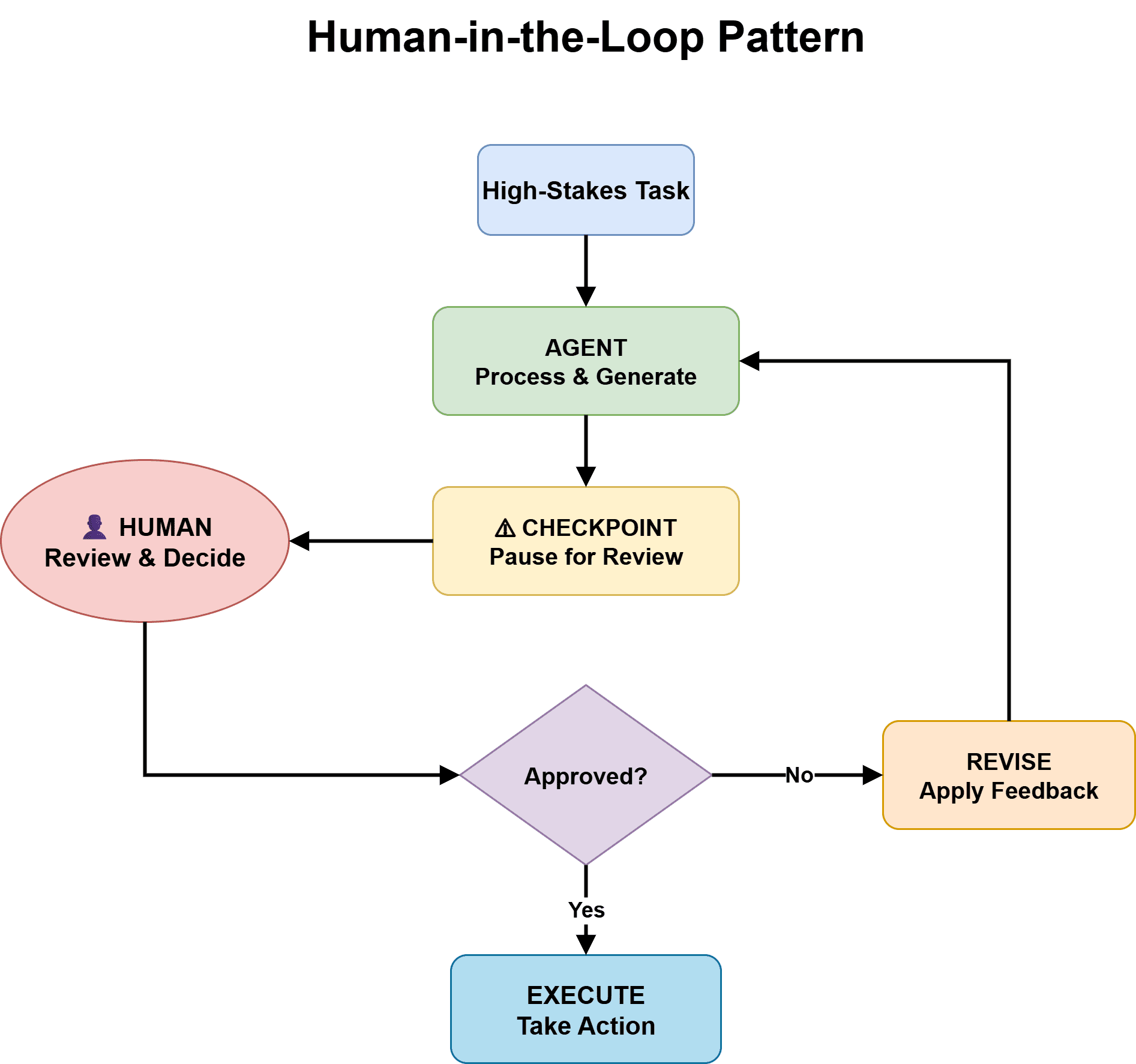
人机协同模式 | 图片来源:作者
这并非缺乏自动化;这是一种智能系统设计,承认某些决策需要人类的判断、问责制或监督。智能体自主处理常规工作,但将特定决策升级给人。
适用场景:决策涉及重大后果、安全问题或需要人类问责制的主观判断。例如:
- 超过授权阈值的财务交易
- 需要细致判断的边缘案例内容审核
- 提交或签署前的法律文件批准
- AI筛选但人类决定的招聘决策
局限性:人机协同增加了架构复杂性,需要基础设施来暂停工作流、通知人类、管理交接和恢复执行。您需要明确的升级标准;如果没有这些标准,您要么会因为琐碎的决策而给人类增加负担,要么会自动化那些需要监督的选择。
对于可能造成重大损害或问责制要求人类决策的高风险应用来说,人机协同是强制性的。该模式承认完全自动化并不总是目标;机器效率与人类判断之间的适当平衡,通常比单独使用任何一种都能带来更好的结果。
总结
大多数模式的决策归结为三个问题:
- 工作流是可预测的吗? 如果是,顺序模式在成本和速度上占优。如果不是,您需要动态编排。
- 质量比速度更重要吗? 如果是,增加反射或人机协同。如果不是,则优化直接执行。
- 任务是否真正复杂? 如果是,考虑多智能体或规划模式。如果不是,从具有工具使用的单个智能体开始。
过早地采用复杂模式是昂贵的错误。多智能体系统很令人印象深刻,但具有ReAct和适当工具的单个智能体可以有效地处理大多数现实世界的任务。从小处着手。仅当您遇到明显的限制时,才增加复杂性。监控成本、延迟和质量指标。让生产反馈指导您对重大变更的决策。
我希望您觉得这份Agentic AI设计模式的概述很有用。然而,您应该注意以下几点:所有成功的智能体系统都会演变。
您用一种模式启动,发现其局限性,然后进行调整。顺序工作流出现瓶颈,因此您会增加并行处理。单个智能体达到其能力上限,因此您会转向多智能体系统。纯粹的自动化会出错,因此您会插入人工检查点。
在考虑这些模式时,选择您的起始模式。但要投入更多精力于可观测性、评估和迭代基础设施。这样,好的模式才能成为伟大的系统。祝您构建顺利!
参考文献
- 为您的Agentic AI系统选择设计模式 | 云架构中心
- 从零到一:学习Agentic模式
- AWS 上的 Agentic AI 模式和工作流 – AWS 规范性指导
- Avi Chawla 总结的 5 种 Agentic AI 设计模式
- 什么是 Agentic 工作流?模式、用例、示例等 | Weaviate
🚀 想要体验更好更全面的AI调用?
欢迎使用青云聚合API,约为官网价格的十分之一,支持300+全球最新模型,以及全球各种生图生视频模型,无需翻墙高速稳定,文档丰富,小白也可以简单操作。
评论区