



📢 转载信息
原文作者:Sri Elaprolu, Alla Simoneau, Paul Amadeo, and Laura Kulowski
在我们之前的文章《用人工智能变革物理世界:智能自动化的下一个前沿》中,我们探讨了物理人工智能如何重新定义建筑、制造、医疗保健和农业等广泛行业。现在,我们将目光转向这项技术背后的完整开发生命周期——即创建智能系统的过程,这些系统不仅遵循指令,还能真正与人类合作,协作、预判需求并积极朝着共同目标前进。
为了说明这一工作流程的实际应用,我们将探讨Diligent Robotics如何运用物理人工智能原理,开发能够在医院环境中协助临床团队的移动机器人。我们还将分享企业领导者在实施可改善其运营和客户体验的物理人工智能解决方案时需要考虑的关键因素。
定义物理人工智能
人与机器之间的关系正在经历深刻的转变。最初是直接由人类控制的简单工具,现在已经发展成为复杂的伙伴关系,智能机器能够理解上下文、解释意图并做出自主决策。
物理人工智能(Physical AI)一词描述的是一种交互式和迭代式的系统。物理人工智能是一个过程,其中各个元素以各种模式协同工作,以理解、推理、学习和与物理世界进行交互。在自主飞轮的每个步骤中,元素都在持续学习和改进,为旅程的下一步提供动力。
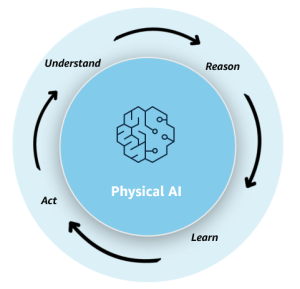
这个过程始于理解。在这里,我们将模型和算法与传感器、真实世界和模拟数据相结合,并利用这些数据集进行推理。接下来,推理模型实时预测将在物理世界中实现的动作。但对于这些智能系统来说,过程并未就此停止——它们必须通过反馈循环持续迭代学习,以提高系统的整体性能。
端到端物理人工智能工作流程:人机协作
这种先进自主性的下一步飞跃包含了什么?开发和部署物理人工智能解决方案是一个迭代过程,包括数据收集和准备、模型训练和优化以及边缘操作。开发生命周期如下图所示。让我们来探讨其中每个要素。
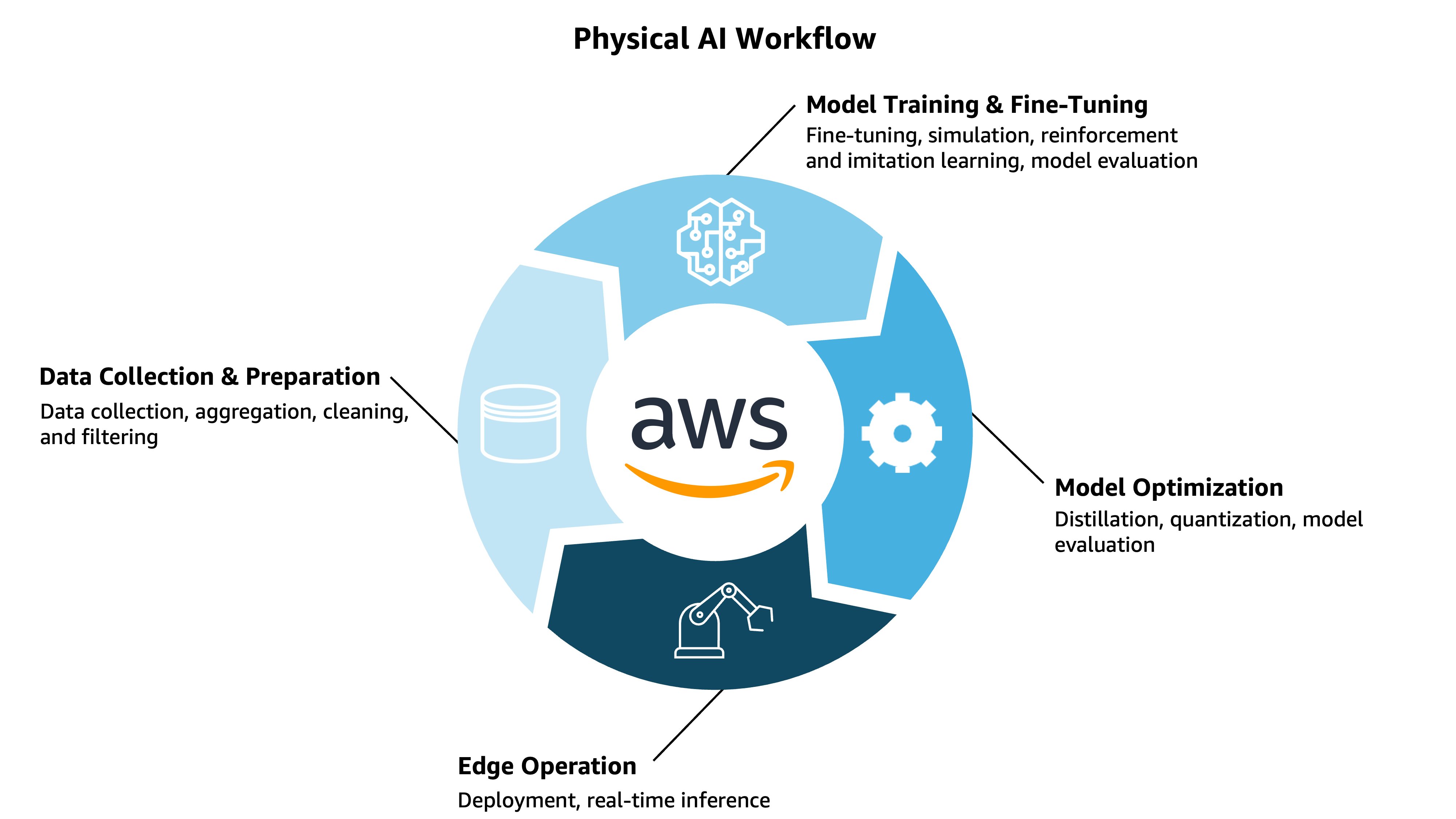
数据收集和准备
工作流程的第一步是为下游任务(包括模型训练和评估)收集和准备数据。这可能包括为特定应用收集的专有数据,以及开源数据和模拟数据。这些数据源会根据下游任务进行存储、清洗和过滤。
模型训练和微调
训练物理人工智能系统以有效与现实世界交互带来了超越传统机器学习方法的独特挑战。这些系统必须学会导航复杂、动态的环境,操作具有不同特性的物体,并适应意外情况。为了开发能够在多样化现实环境中可靠运行、有能力且稳健的物理人工智能系统,已经出现了一些专门的训练方法,包括:
- 强化学习:自主机器可以通过与环境的试错互动来学习技能。与需要标记数据集的监督学习不同,强化学习允许物理人工智能系统直接从经验中学习,通过最大化奖励函数。
- 物理信息强化学习:将物理知识集成到学习过程中,以提高样本效率和泛化能力。这种方法有助于弥合纯粹数据驱动方法与传统基于物理的控制之间的差距。
- 模仿学习:物理人工智能系统可以从人类演示中学习,而不是通过试错。当任务很难通过奖励函数指定,但人类可以轻松演示时,这种方法尤其有价值。行为克隆和逆强化学习等技术允许机器人观察人类行为并推断潜在策略或奖励函数。
- 基于仿真的训练:提供物理系统的虚拟副本,支持在部署到现实世界之前进行安全、经济高效的训练。数字孪生充当模拟系统,用于训练专业人工智能模型,使开发人员能够在真实世界部署之前测试和完善机器人行为。基于仿真的训练具有安全、快速、可扩展、可重现和经济高效等优势。
模型优化
模型训练完成后,可以针对特定的硬件、延迟要求、计算成本或性能进行优化。模型优化技术包括:
- 量化:降低权重和激活的数值精度。常见的量化方法包括将
float32降至float16,以及将float32降至int8。量化旨在减少内存存储需求并提高推理速度。 - 蒸馏:在保持性能的同时,将知识从大型模型转移到较小的模型。较小的模型可以部署在性能较低的硬件上,并具有较低的计算成本。
生成的边缘兼容模型随后在现实世界或模拟任务上进行评估。模型训练和优化会迭代完善,直到达到所需的性能。
边缘操作
最后,将优化后的模型部署到现场,在实际硬件上验证其功能。系统持续收集操作数据和性能指标,并系统地将它们传输回基于云的解决方案进行分析。云基础设施可以执行额外的模型训练和优化策略。然后将修改后的模型重新部署到边缘,在那里发生模型推理(边缘计算)。边缘计算是指决策和动作发生的地方,例如停止机械臂或打开大门。这种感知、思考和行动的工作流程创造了一个持续改进的循环。对于任务关键型应用来说,能够在几毫秒内预测动作至关重要。
技术实战:Diligent Robotics 如何改变医疗保健行业
支持这种主动协作(智能系统预判需求并与人类并肩工作)的技术并非仅停留在理论层面。它们已经在实施中,并正在产生可衡量的影响,例如在医疗保健领域,那里的风险很高,而且对人际联系的需求至关重要。
以护士的日常工作为例。她们通常花费大量时间处理将她们从患者护理中抽离出来的任务,例如送药、运送实验室样本和取用品。作为 AWS 物理人工智能研究员(Physical AI Fellow)的Diligent Robotics 正在利用上述工作流程来解决这一挑战,开发了 Moxi,这是一款移动操作机器人,旨在处理日常后勤工作,为护士和患者节省宝贵时间。

Moxi的智能通过对医院环境的持续学习而不断增长。机器人收集的操作数据为其底层模型提供支持。这种迭代过程使 Moxi 在医疗机构复杂、动态的环境中导航时越来越可靠和有能力。然后,模型会针对效率进行优化——需要更少的计算能力并实现更快的处理——以便可以部署到边缘。边缘部署允许 Moxi 自主地做出实时决策,无论是按下电梯按钮还是开门,这在依赖连接并非总能实现的安全关键环境中至关重要。
结果非常显著,Diligent Robotics 报告称:
- Moxi 医院车队已完成超过 120 万次递送
- 为医院工作人员节省了近 60 万小时
Moxi 已对全国的医疗系统产生了影响。例如,在纽约的 Rochester Regional Health,Moxi 机器人已经:
- 重塑了药物递送工作流程,例如“从药房到病床”计划,Moxi 在其中支持时间敏感的药物递送,以减少出院延迟,改善患者体验并最大限度地减少再入院。
- 简化了实验室工作流程,提高了患者实验室结果的可预测性和及时性。
Moxi 的影响超越了数字本身。Rochester Regional Health 的首席药剂师表示:“我们专注于为下一代设计医疗保健,这意味着我们要尽可能地进行创新,让我们的团队回到患者护理中。Moxi 已经成为我们运营中不可或缺的一部分。”
正如 Diligent Robotics 创始人兼首席执行官 Andrea Thomaz 所观察到的:“看到临床团队与 Moxi 互动,就像它是团队中真实的一员——和它打招呼说‘早上好’,给它击掌,甚至称它为‘本周员工’——这是最令人欣慰的人机体验之一。”
物理人工智能的未来展望
物理人工智能的前进道路已经由早期采用者所规划,他们在现实世界中证明了其价值——从医院减少倦怠和改善患者护理,到工厂提高安全性和一致性。他们的结果发出了明确的信号:成功并非来自于彻底的颠覆,而是来自于实现可衡量结果的、有针对性的、高影响力的应用。
仅凭最好的技术来构建解决方案是不够的。随着物理人工智能系统越来越多地融入我们的世界,周到的治理对于企业领导者来说变得至关重要。最近的突破正在创造新的机遇和新的挑战。企业领导者需要解决:
- 云连接机器人车队的网络安全问题
- 系统与现有基础设施之间的互操作性
- 包括自适应方法和冗余系统在内的安全机制
- 促进透明度、公平性和隐私的道德框架
监管方法因司法管辖区而异。例如,欧盟已通过解决安全和道德问题的全面框架,而美国则采取了由行业主导的倡议驱动的、特定于部门的方法。
企业领导者必须在遵循这些不同标准的同时,保持全球运营的一致性。基于风险的治理方法提供了一个有效的战略——根据人工智能应用的潜在影响对其进行分类,并应用适当的控制措施。这种平衡的方法可以满足各种监管要求,同时保持持续创新的敏捷性。
通过从小处着手、快速学习并推广有效的方法,组织可以建立持久的能力,实现明确的投资回报率(ROI),并在物理人工智能革命的前沿为更广泛的实施做好准备。未来属于那些成功地将数字智能与物理能力相结合,同时积极解决治理、安全和道德问题的组织。
像 物理人工智能研究员计划 这样的倡议——由 AWS、MassRobotics 和 NVIDIA 共同推动——体现了加速此类进步所需的协作精神。
开始使用物理人工智能
准备好探索物理人工智能如何改变您的运营了吗?了解有关 生成式人工智能创新中心 的更多信息,以及我们如何与组织合作,加速他们从概念到可投入生产的物理人工智能解决方案的旅程。
联系您的 AWS 客户经理,讨论我们的物理人工智能解决方案并获得量身定制的实施支持。
关于作者
 Sri Elaprolu 是 AWS 生成式人工智能创新中心的主管,负责领导一个全球团队,为企业和政府组织实施尖端人工智能解决方案。在 AWS 工作的 13 年中,他领导了与 NFL、Cerner 和 NASA 等组织合作的机器学习科学团队。加入 AWS 之前,他在诺斯罗普·格鲁曼公司担任产品开发和软件工程领导职务 14 年。Sri 拥有工程科学硕士学位和工商管理硕士学位。
Sri Elaprolu 是 AWS 生成式人工智能创新中心的主管,负责领导一个全球团队,为企业和政府组织实施尖端人工智能解决方案。在 AWS 工作的 13 年中,他领导了与 NFL、Cerner 和 NASA 等组织合作的机器学习科学团队。加入 AWS 之前,他在诺斯罗普·格鲁曼公司担任产品开发和软件工程领导职务 14 年。Sri 拥有工程科学硕士学位和工商管理硕士学位。
 Alla Simoneau 是一位技术和商业领导者,拥有超过 15 年的经验,目前担任 Amazon Web Services (AWS) 的新兴技术物理人工智能负责人,负责推动人工智能与现实世界应用交叉领域的全球创新。Alla 在亚马逊工作了十多年,是战略、团队建设和卓越运营方面的公认领导者,专注于将尖端技术转化为初创企业和企业客户的现实世界变革。
Alla Simoneau 是一位技术和商业领导者,拥有超过 15 年的经验,目前担任 Amazon Web Services (AWS) 的新兴技术物理人工智能负责人,负责推动人工智能与现实世界应用交叉领域的全球创新。Alla 在亚马逊工作了十多年,是战略、团队建设和卓越运营方面的公认领导者,专注于将尖端技术转化为初创企业和企业客户的现实世界变革。
 Paul Amadeo 是一位经验丰富的技术领导者,在人工智能、机器学习、物联网系统、射频设计、光学、半导体物理和先进工程领域拥有超过 30 年的经验。作为 AWS 生成式人工智能创新中心物理人工智能的技术主管,Paul 专注于将人工智能能力转化为有形的物理系统,指导企业客户完成从概念到生产的复杂实施。他多元化的背景包括为边缘环境构建计算机视觉系统、设计了生产了数十亿设备的机器人智能卡制造技术,以及在商业和国防领域领导跨职能团队。Paul 拥有加州大学圣地亚哥分校应用物理学硕士学位,加州理工学院应用物理学学士学位,并拥有六项跨越光学系统、通信设备和制造技术的专利。
Paul Amadeo 是一位经验丰富的技术领导者,在人工智能、机器学习、物联网系统、射频设计、光学、半导体物理和先进工程领域拥有超过 30 年的经验。作为 AWS 生成式人工智能创新中心物理人工智能的技术主管,Paul 专注于将人工智能能力转化为有形的物理系统,指导企业客户完成从概念到生产的复杂实施。他多元化的背景包括为边缘环境构建计算机视觉系统、设计了生产了数十亿设备的机器人智能卡制造技术,以及在商业和国防领域领导跨职能团队。Paul 拥有加州大学圣地亚哥分校应用物理学硕士学位,加州理工学院应用物理学学士学位,并拥有六项跨越光学系统、通信设备和制造技术的专利。
 Laura Kulowski 是 AWS 生成式人工智能创新中心的高级应用科学家,与客户合作构建生成式人工智能解决方案。在加入亚马逊之前,Laura 在哈佛大学地球与行星科学系完成了博士学位,并利用“朱诺号”探测器的数据研究了木星的深层纬向流和磁场。
Laura Kulowski 是 AWS 生成式人工智能创新中心的高级应用科学家,与客户合作构建生成式人工智能解决方案。在加入亚马逊之前,Laura 在哈佛大学地球与行星科学系完成了博士学位,并利用“朱诺号”探测器的数据研究了木星的深层纬向流和磁场。
🚀 想要体验更好更全面的AI调用?
欢迎使用青云聚合API,约为官网价格的十分之一,支持300+全球最新模型,以及全球各种生图生视频模型,无需翻墙高速稳定,文档丰富,小白也可以简单操作。
评论区