



📢 转载信息
原文链接:https://www.nature.com/articles/d41586-026-00513-z
原文作者:Nature
一项受壁虎脚垫启发的粘合剂技术,使一个机器人能够攀爬光滑和粗糙的垂直表面。
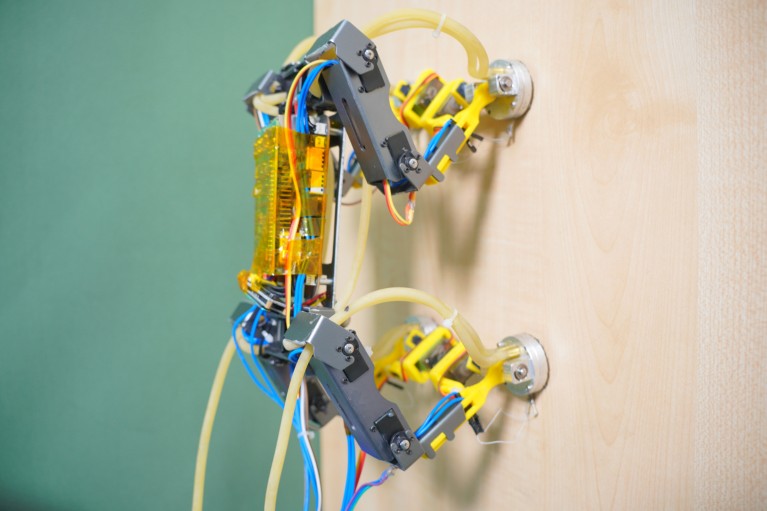
通过加热和冷却其脚部,一个机器人可以缓慢爬上由几种材料制成的墙壁。来源:J. Feng et al./Matter
一个四足机器人可以爬上钢、玻璃、铝或粗糙木材制成的墙壁,其脚部依靠受壁虎启发的粘合剂1固定。
doi: https://doi.org/10.1038/d41586-026-00513-z
参考文献
-
Feng, J. et al. Matter https://doi.org/10.1016/j.matt.2025.102571 (2026).
🚀 想要体验更好更全面的AI调用?
欢迎使用青云聚合API,约为官网价格的十分之一,支持300+全球最新模型,以及全球各种生图生视频模型,无需翻墙高速稳定,文档丰富,小白也可以简单操作。
评论区