



📢 转载信息
原文链接:https://machinelearningmastery.com/7-must-know-agentic-ai-design-patterns/
原文作者:Bala Priya C
在本文中,您将了解到七种经过验证的智能体AI设计模式,了解何时使用每种模式,以及如何为您的生产工作负载选择正确的模式。
我们将涵盖的主题包括:
- ReAct、反射 (Reflection)、规划 (Planning)、工具使用 (Tool Use)、多智能体协作 (Multi-Agent Collaboration)、顺序工作流 (Sequential Workflows) 和 人机协作 (Human-in-the-Loop) 等核心模式。
- 不同模式之间的权衡:成本、延迟、可靠性和可观察性。
- 一个实用的决策框架,用于在生产环境中选择和演进模式。
我们现在就开始吧。

七种必备的智能体AI设计模式
图片来源:Editor
引言
要在生产环境中构建实用的AI智能体,需要的不仅仅是强大的模型。您需要一个清晰的结构来指导智能体如何推理、协调、自我修正并使用工具来完成目标。
设计模式为此提供了结构。它们就像定义智能体行为的蓝图,帮助我们将有能力的模型转变为可靠的系统。那些能够扩展的智能体与那些挣扎的智能体之间的区别,就在于选择的模式是否与您的任务需求相匹配。
本文将解释区分有效智能体和昂贵实验的七种设计模式。这些模式借鉴了Google、AWS和其他大规模部署智能体团队发布的研究和指南。
1. ReAct 模式:推理与行动(Reason and Act)
ReAct(推理与行动)模式将智能体的行为结构化为明确的推理循环。智能体不会直接得出结论,而是交替进行以下阶段:
- 推理(分析当前信息并确定信息缺口),
- 行动(执行工具或查询),以及
- 观察(评估结果以确定下一步行动)。
这个循环会重复,直到任务完成。
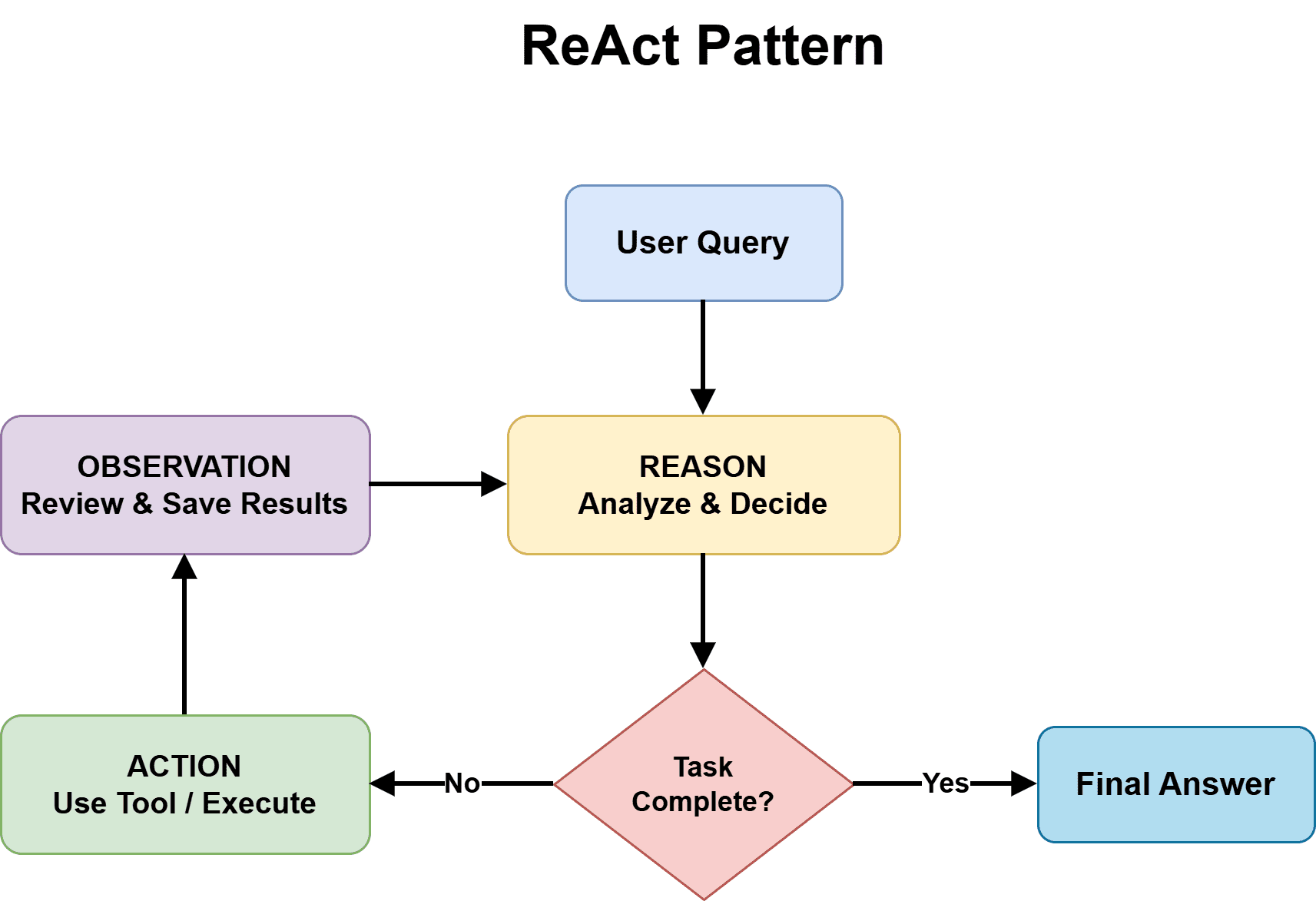
ReAct 模式 | 图片来源:作者
ReAct模式之所以有效,在于其将推理过程外部化。每一个决策都变得可见,从而创建了一个清晰的审计追踪。当智能体失败时,您可以看到逻辑确切地在哪里中断。该模式通过强制智能体将每一步都建立在可观察的结果之上,从而防止过早下结论并减少幻觉。
何时使用:任务需要自适应的问题解决能力,且解决方案路径是预先未定的。例如:
- 跨多个来源追踪证据的研究智能体
- 通过迭代假设测试诊断问题的调试助手
- 处理需要调查的非标准请求的客户支持智能体
局限性:ReAct模式以思考换取速度。每个推理循环都需要额外的模型调用,从而增加了延迟和成本。如果一个工具返回了不正确的数据,该错误可能会在后续的推理步骤中传播。此外,该模式的有效性取决于您基础模型的推理能力:弱模型会产生弱的推理链。
对于复杂且不可预测的任务,ReAct可以作为您的默认起点。它提供的透明度使调试更快,并增强了对智能体决策的信任,即使每个请求完成得更慢。您在计算上花费的更多,但在排除故障时花费的会更少。
2. 反射模式:自我批判的智能体
反射在智能体输出中增加了一个自我评估层。智能体生成初始响应后,会明确切换到批评模式来评估自己的工作。在此批评阶段,它会检查准确性、验证对约束条件的遵守情况,并识别逻辑上的差距或不一致之处。如果自我评估发现问题,智能体将修改其输出并重复该过程,直到满足质量阈值。
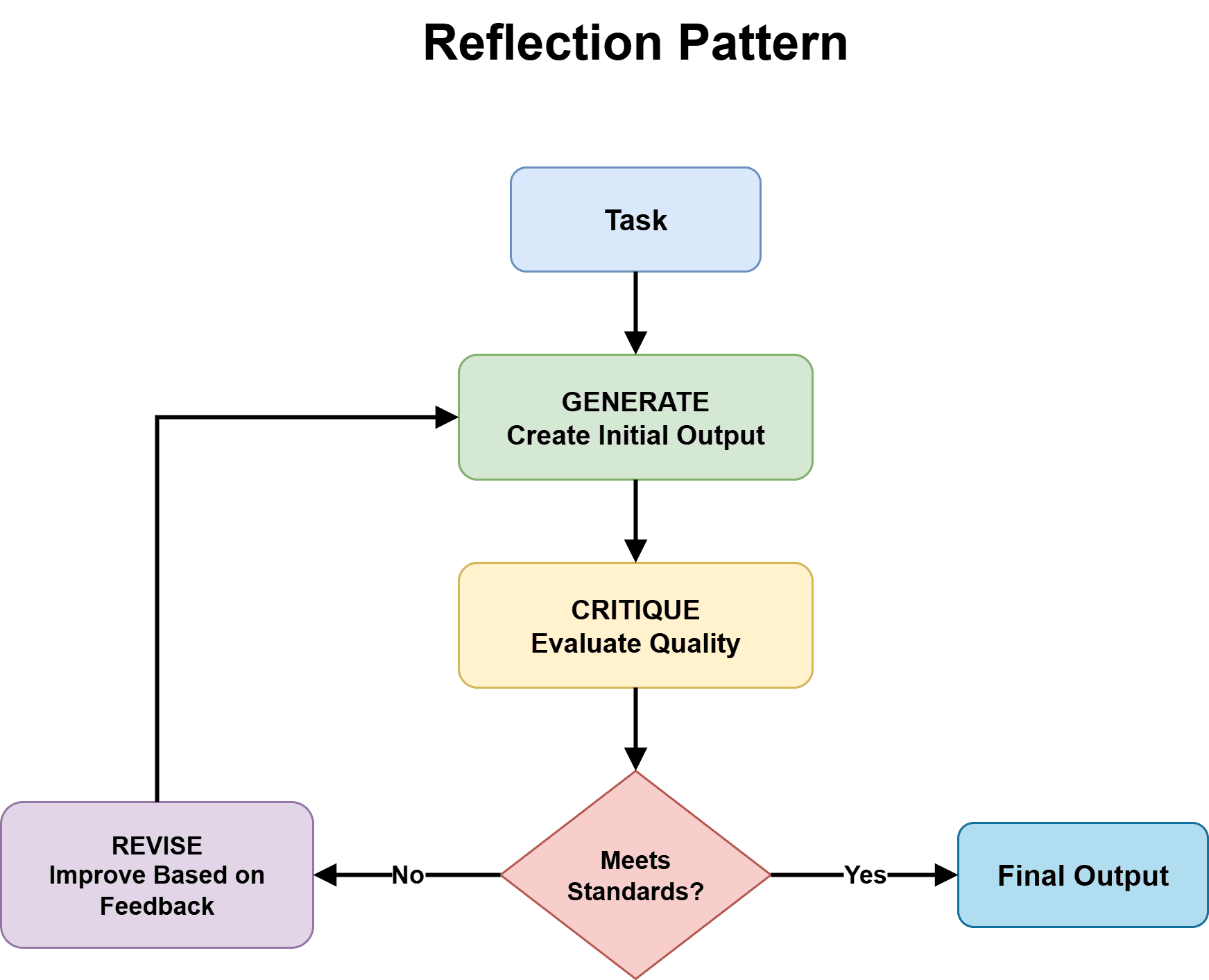
反射模式 | 图片来源:作者
关键优势在于角色分离。通过强迫智能体退后一步进行评估,而不是为其第一个答案辩护,可以减少确认偏误。智能体将其自己的输出视为外部内容一样对待。
何时使用:输出质量明显比速度更重要,且错误会带来重大后果的任务。这适用于以下任务:
- 需要安全审计或合规性检查的代码生成
- 需要在发布前进行事实核查的内容创作
- 可能导致资金损失的金融分析
局限性:每个反射周期都会增加Token消耗和延迟。如果没有明确定义的退出条件,智能体可能会不必要地循环——要么永远无法满足自己的标准,要么仍然产生有缺陷的工作。您的批评标准必须具体且可衡量;像“检查这个是否好”这样模糊的指令会产生不一致的结果。
当错误的成本超过额外处理时间的成本时,反射模式才是有意义的。它在具有可明确验证的清晰质量标准的环境中特别有效。然而,它需要前期投入来定义“足够好”的标准,否则您将浪费资源在那些不会改善结果的修订周期上。
3. 规划模式:先分解,再构建
规划智能体在开始执行之前,会将复杂任务分解成结构化的路线图。它们不会直接尝试解决问题,而是首先分析需求、识别子任务之间的依赖关系,并按逻辑顺序排列操作。只有在创建了详细的计划后,智能体才开始实际工作,遵循其构建的路线图。
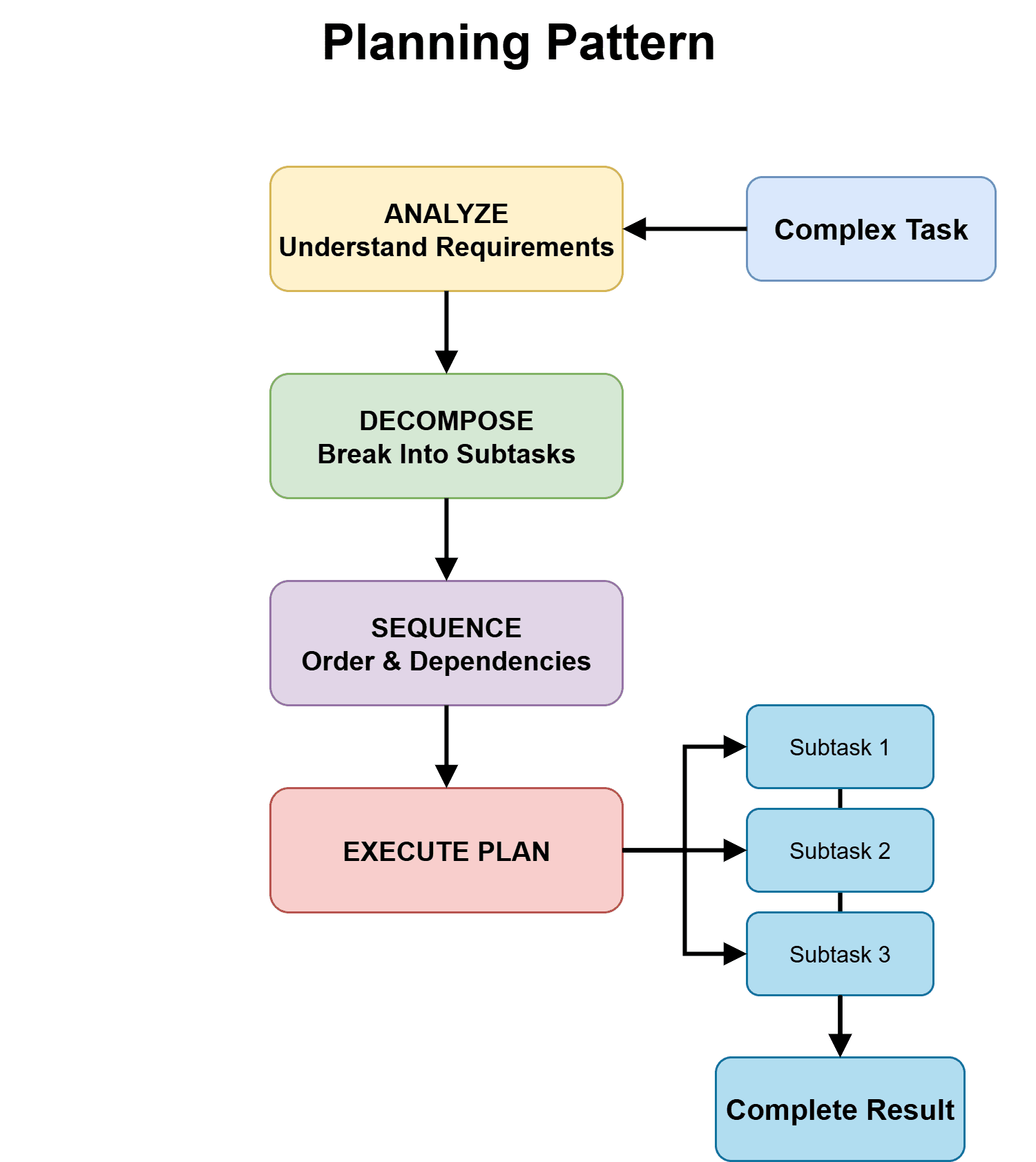
规划模式 | 图片来源:作者
这对于具有隐藏复杂性的任务很有帮助。看似简单的请求通常需要协调多个系统、处理边缘情况以及整合来自不同来源的信息。规划智能体会立即显现这种复杂性,避免了智能体在执行过程中发现走错路线而导致的障碍。
何时使用:任务涉及重大的复杂性或协调性,需要明确结构支持。例如:
- 为避免冲突需要特定排序的多系统集成
- 跨不同来源整合信息的调研项目
- 涉及转换步骤依赖关系的数据迁移项目
- 协调设计、实施和测试的产品开发工作流
局限性:规划的开销只有在处理真正复杂的工作时才值得。简单任务不需要复杂的分解。挑战在于准确地预估任务的复杂性。
规划模式通过在出现问题之前显现依赖关系和排序问题,避免了在真正复杂的任务中出现昂贵的错误启动和返工。对于简单任务,这纯粹是开销;只将其保留给那些依赖即时方法会持续失败或需要多次尝试才能成功完成的工作。
4. 工具使用模式:超越训练数据的扩展
工具使用使智能体能够通过集成外部能力来执行超出其训练数据的操作。能够访问工具的智能体可以调用API、查询数据库、执行代码、抓取网站以及与软件系统交互。模型会协调这些能力,根据任务需求决定调用哪些工具,解释其输出,并将工具调用链接起来,以实现仅靠静态知识无法实现的目标。
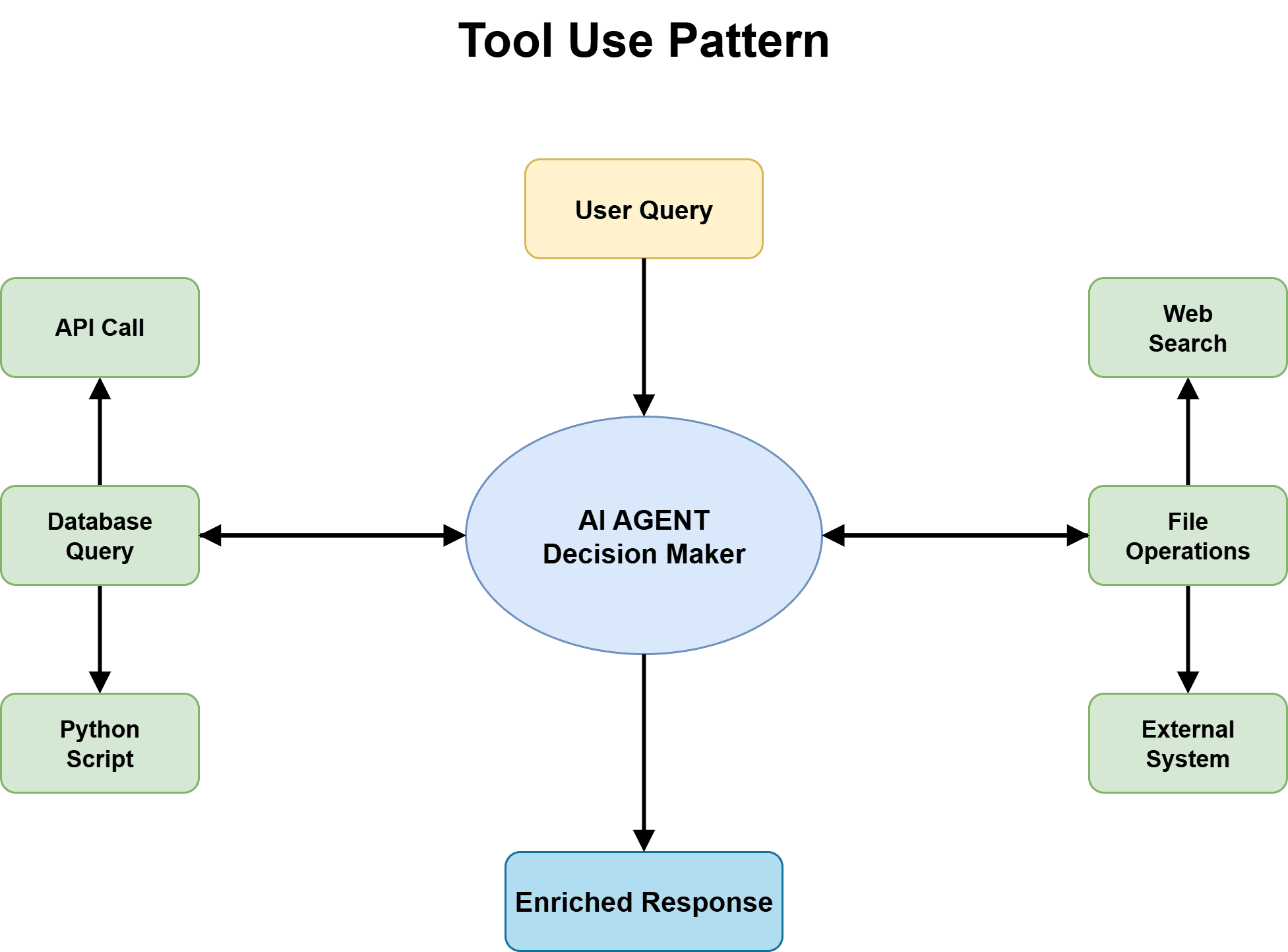
工具使用模式 | 图片来源:作者
这使得智能体从知识库转变为能够与世界进行实时交互的主动系统。智能体会推理出哪种工具适用于每种情况,处理工具失败时的错误,并将多个工具调用的结果综合成连贯的响应。
何时使用:任务需要当前信息、外部计算或与系统交互。例如:
- 查询订单数据库和库存系统的客户服务智能体
- 在实时数据集上运行统计计算的数据分析智能体
- 访问超出训练截止日期的最新信息的研究助手
- 在业务软件平台中触发操作的自动化智能体
- 在真实环境中执行和测试代码的开发助手
局限性:工具的可靠性决定了您的智能体系统的可靠性。当API返回错误、达到速率限制或超时时,您的智能体就会继承这些失败。您还必须承担每个集成工具的维护负担,随着API变化而更新实现。
对于处理现实世界任务的生产智能体来说,工具使用模式几乎是不可或缺的。几乎每个实用的智能体都需要至少基本的工具访问权限来查询当前信息或触发操作。挑战不在于是否实现工具使用,而在于如何管理工具的可靠性、选择准确性和随着工具库扩大而带来的日益增长的复杂性。
5. 多智能体协作模式:专家协同工作
多智能体系统将工作分配给专业智能体,而不是构建一个通才。每个智能体都具有集中的专业知识、特定的工具和在系统中明确定义的角色。协调智能体管理工作分配,将任务路由给适当的专家,并将它们的输出综合成统一的响应。
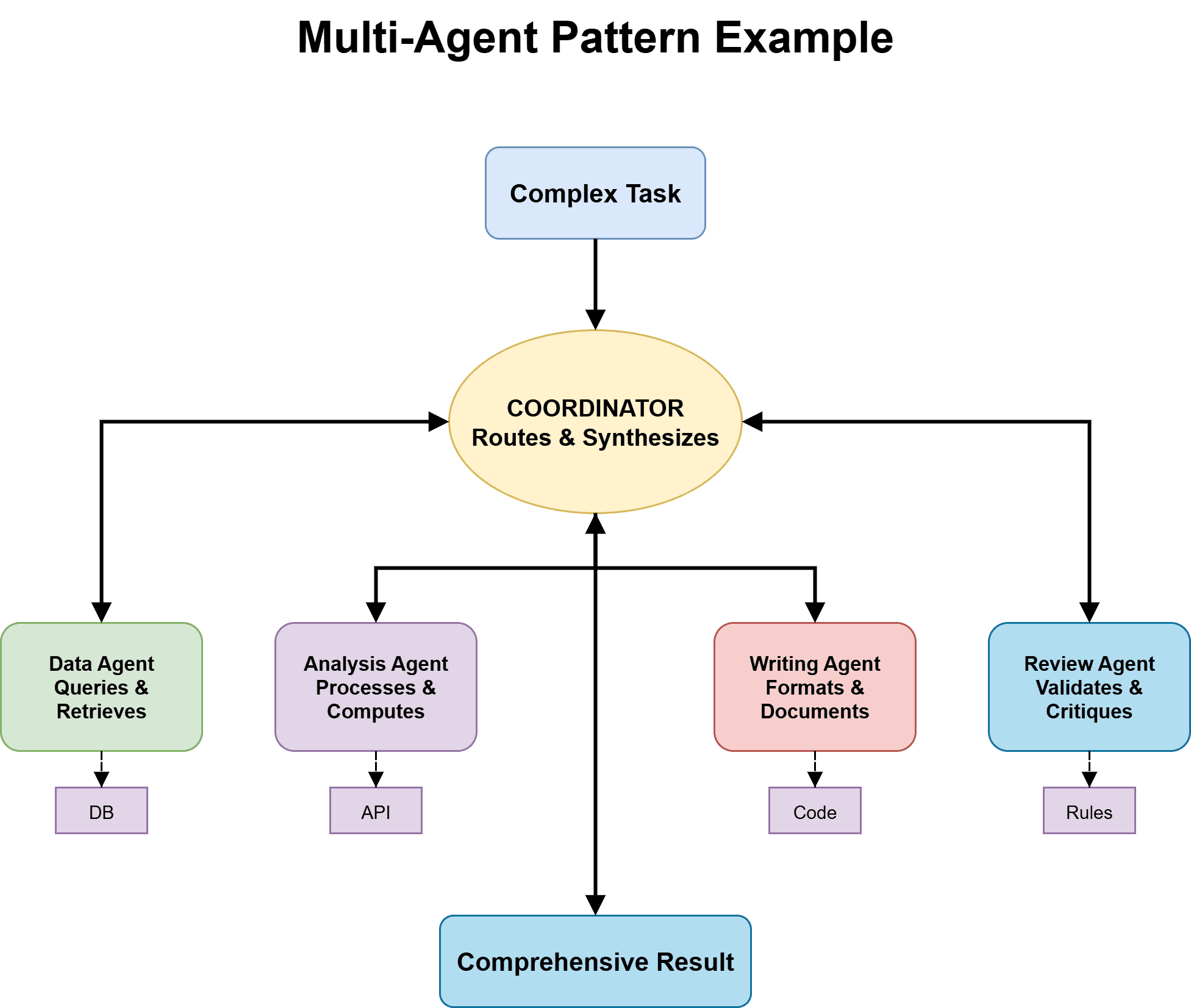
多智能体协作模式 | 图片来源:作者
每个智能体都可以通过有针对性的提示、特定的工具和适当的模型针对其领域进行优化。构建得当的多智能体系统比不堪重负的通才更有效地处理复杂的工作流。
何时使用:任务确实跨越了需要不同专业知识和方法的多个领域。例如:
- 需要不同技能集(研究→分析→演示)的复杂工作流
- 任务路由受益于专业化处理的应用程序
- 由聚焦的智能体更好地解决的、服务于多样化用例的应用程序
局限性:与单智能体系统相比,多智能体系统的构建、调试和维护要困难得多。协调会增加延迟和复杂性。智能体间的通信会引入新的故障模式。成本会随着智能体数量的增加而增加。除非单智能体方法确实无法满足要求,否则增加的复杂性是不合理的。
当单智能体无法有效处理多样化、复杂的需求时,多智能体系统可以解决实际问题。从单智能体开始,仅在您证明专业化带来了可衡量的改进,并且这种改进超过了系统复杂性的显著增加时,才迁移到多智能体系统。
6. 顺序工作流:可预测的管道
顺序模式将智能体系统组织成固定顺序的管道。智能体A完成其任务并将输出传递给智能体B。智能体B处理后移交给智能体C。每个专家恰好处理预定序列中的一个步骤。编排不需要AI——只需要确定流程的预定义逻辑。这是智能体系统的装配线方法。
下面是一个例子:
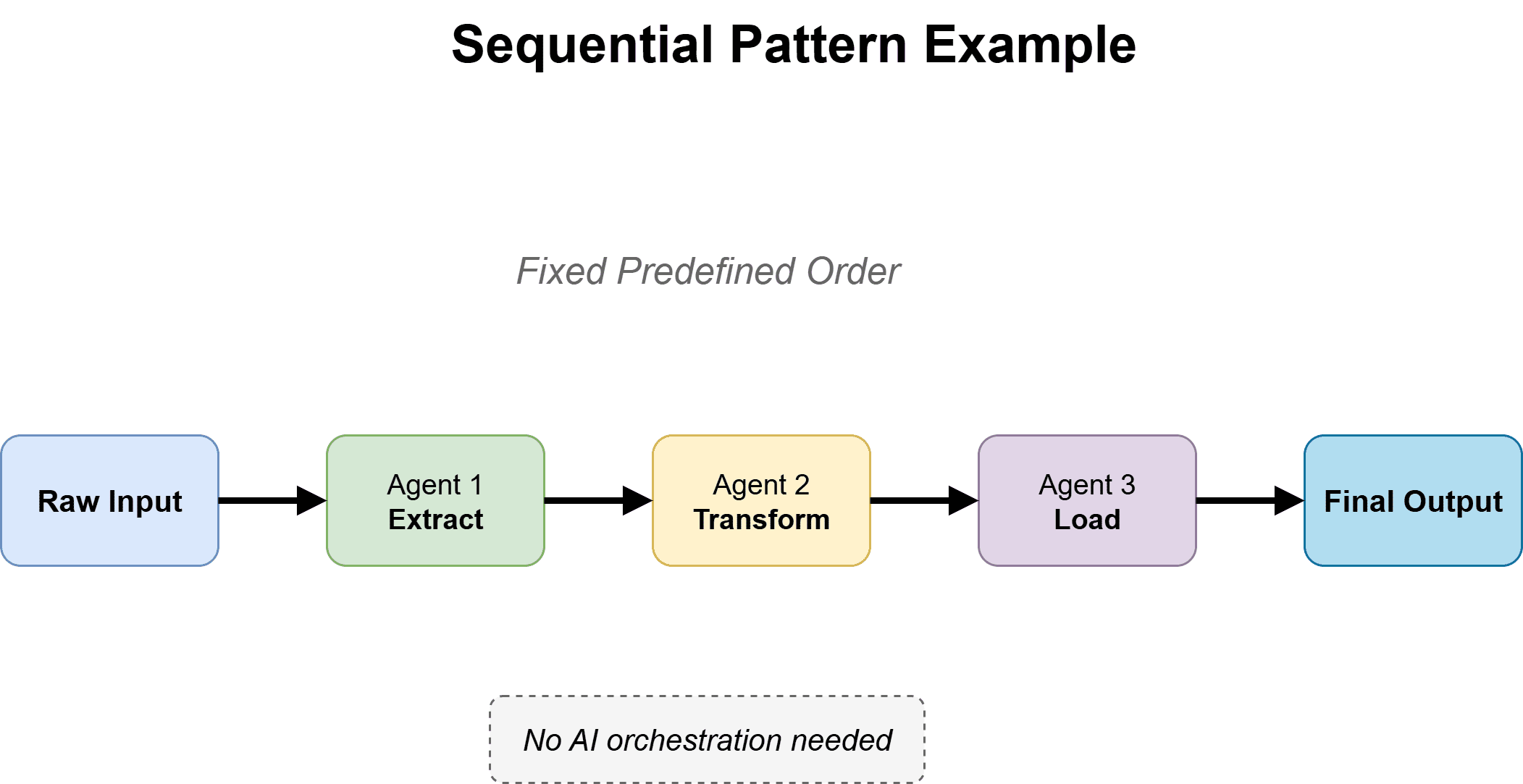
顺序工作流 | 图片来源:作者
优势在于可预测性。顺序工作流具有:
- 比动态路由系统更低的延迟,
- 比基于协调器的方案更低的成本,以及
- 简化的调试所依赖的可预测行为。
当您确切知道哪个智能体处理哪个步骤时,故障排除就变得直接明了。
何时使用:工作流遵循结构化、可重复的模式,且处理顺序很少改变。例如:
- 具有提取、转换和加载阶段的数据管道
- 文档处理流程:解析→分析→总结→存储
- 内容审核:检测→分类→路由→行动
- 订单处理:验证→处理→通知→归档
- 报告生成:收集→分析→格式化→分发
局限性:顺序模式无法适应工作流中间不断变化的情况。如果某些输入不需要第三步,您仍然会执行它。当工作流需要条件逻辑或动态路由时,顺序模式会迫使您走低效的路径或完全失败。
顺序工作流是生产管道的理想选择,在这些管道中,一致性和效率比灵活性更重要。它们为定义明确、可重复的过程最大限度地减少了复杂性和成本。然而,对于需要根据中间结果进行适应或最佳路径因输入而异的任务来说,它们是错误的选择。
7. 人机协作(Human-in-the-Loop):高风险场景的安全护栏
人机协作模式认识到有些决策不应完全自动化。在关键检查点,智能体暂停执行并将信息提交给人工审核员。人类专家评估工作、提供指导或在智能体继续执行之前给予批准。
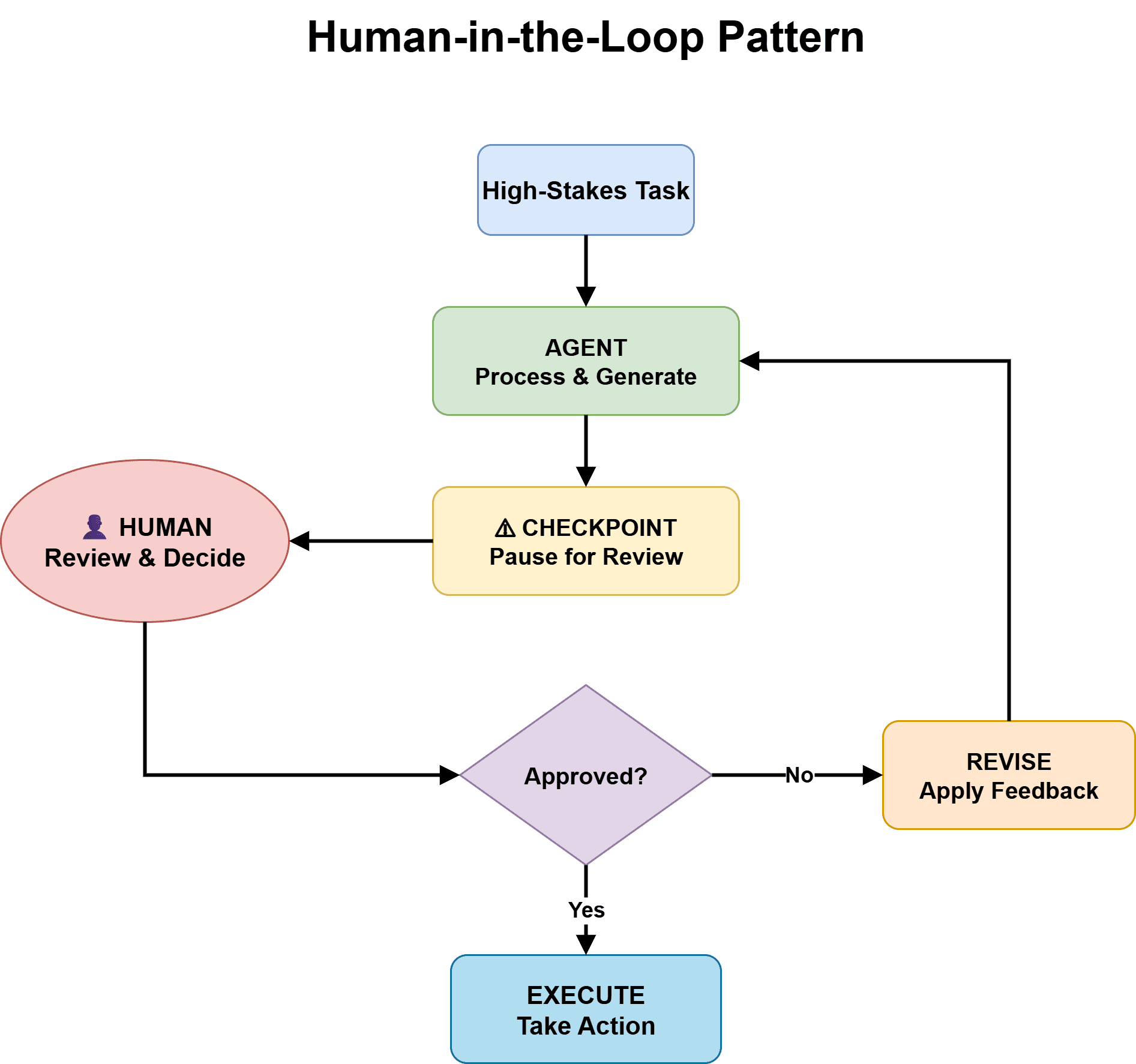
人机协作模式 | 图片来源:作者
这不是自动化不足;而是智能系统设计,它承认某些决策需要人类判断力、问责制或监督。智能体自主处理常规工作,但将特定决策升级给人。
何时使用:决策涉及重大后果、安全问题或需要人工问责的主观判断。例如:
- 超出授权限额的金融交易
- 需要细致判断的边缘案例内容审核
- 法律文件在提交或签署前的批准
- AI筛选但由人类做决定的招聘决策
局限性:人机协作增加了架构复杂性,需要管理暂停工作流、通知人员、处理交接和恢复执行的基础设施。您需要明确的升级标准;否则,您要么会用琐碎的决策来负担人类,要么会自动化那些需要监督的决策。
对于可能造成重大损害或需要人类决策来实现问责制的高风险应用,人机协作是强制性的。该模式承认完全自动化并非总是目标;机器效率和人类判断力的正确平衡通常能带来比单独使用任何一种方法更好的结果。
总结
大多数模式的决策归结为三个问题:
- 工作流是可预测的吗? 如果是,顺序模式在成本和速度上占优。如果不是,您需要动态编排。
- 质量比速度更重要吗? 如果是,增加反射或人机协作。如果不是,则优化直接执行。
- 任务确实复杂吗? 如果是,考虑多智能体或规划模式。如果不是,则从带有工具使用的单智能体开始。
最昂贵的错误是过早地采用复杂的模式。多智能体系统虽然令人印象深刻,但带有适当工具的单智能体可以有效地处理大多数现实世界的任务。从小处着手。只有当您遇到明显的局限性时,才增加复杂性。监控成本、延迟和质量指标。让生产反馈指导您对重大变更的决策。
我希望您觉得这份智能体AI设计模式的概述很有用。然而,您应该注意:所有成功的智能体系统都在不断演进。
您以一种模式启动,发现其局限性,然后进行调整。顺序工作流出现瓶颈,所以您会增加并行处理。单智能体达到能力上限,所以您会转向多智能体系统。纯粹的自动化会出错,所以您会插入人工检查点。
带着对这些模式的认识来选择您的初始模式。但要投入更多精力在可观察性、评估和迭代基础设施上。这就是优秀模式如何变成伟大系统的关键。祝您构建顺利!
参考文献
- 选择您的智能体AI系统的设计模式 | Cloud Architecture Center
- 从零到一:学习智能体模式
- AWS 上的智能体AI模式和工作流 – AWS 规范性指南
- Avi Chawla 提出的 5 种智能体AI设计模式
- 什么是智能体工作流?模式、用例、示例等 | Weaviate
🚀 想要体验更好更全面的AI调用?
欢迎使用青云聚合API,约为官网价格的十分之一,支持300+全球最新模型,以及全球各种生图生视频模型,无需翻墙高速稳定,文档丰富,小白也可以简单操作。
评论区